
3d 프린터로 제작중인 tricopter 드론
-STM32를 이용한 쿼드콥터 제작 및 3d프린터로 제작중인 트리콥터안녕하세요. [3D프린터로 영구동기발전기 만들기]란 제목으로 게시글을 올린전기공학과 학생입니다.오늘은 INAV 소프트웨어와 STM32F411CEU6를 이용하여 F450 멀티콥터 드론을 제작한경험과 현재 3D 프린터로 제작중인 트리(TRICOPTER)콥터 소개할려고 합니다.1.[INAV 소프트웨어및 STM32F411로 제작한 쿼드콥터 제작]:<완성된 쿼드콥터 드론 모습>제작하는 과정을 소개하기 전에, 멀티콥터의 정의와 드론에 사용되는 소프트웨어에대해 알아보겠습니다.[쿼드콥터]: 회전날개(로터)를 4개 가지고 있으며, 이 4개의 날개을 이용해 양력을 발생시켜비행하는 드론입니다.[특징]: 각 로터는 연직 아래를 향해 있으면, 두 개는 시계방향으로, 나머지 두 개는반시계 방향으로 회전합니다. 이들 로터의 회전 속도를 조절함으로써 쿼드콥터의움직임을 제어할 수 있습니다.///////////////////////////////////////////////////////////////////////////////////////////////////////////드론제어에 대표적으로 사용하는 소프트웨어 3개를 살펴보면,1.[ARDUPILOT]:아두이노+Autopilot 의 줄임말으로,무인 차량 및 드론 등 원격조정 또는 자동화, 자율제어에 대한 오픈소스 소프트웨어 입니다.<장점>:1.그래픽 디자인이 세련됨.2.pc용,맥북,아이폰/아이패드,안드로이드용 모두 있으며 통일된 인터페이스를 가짐.3.상업적 사용에 대한 소스코드 의무 공개가 없다.<단점>:1텔레메트리 라디오 설정이 불편.2.드론 모터 테스트같은 GUI가 없다.3.드론 초심자가 접근하기 힘듬.2.[BETAFLIGHT]:누구나 무료로 사용할 수 있는 오픈소스 프로그램 입니다.베이스플라이트(BASEFLIGHT)란 소프트웨어에서 파생된 클린플라이트(CLEANFLIGHT)소프트웨어에서 다시파생된 오픈소스 소프트웨어이고 레이싱 드론을 제어하는데 있어 최적화된 소프트웨어 입니다.<장점>:1.레이싱 드론 제어에 대한 기능들이 많이 있음.2.드론을 가지고 곡예가 가능.즉 다이나믹한 동작을 구현할 수 있다.3.소프트웨어 가독성이 좋다(즉 초심자가 접근하기 쉽다.)<단점>:1. MISSIONPLANER같은 세부적이고 정밀적인 자율제어는 약하다.2.PID제어가 민감해서 드론 모터가 쉽게 발열이 발생.3..RC비행기 같은 드론을 제어하는데 적합하지 않다.3.[INAV]:CLEANFLIGHT 소프트웨어에서 파생된 오픈소스 소프트웨어이고 사요하는 FV기반으로 DJI NAZA시리즈나 ARDUPILOT MEAG와같은 GPS기반 항법이 가능한 FC를 구현합니다. 비행 성능 보다는 GPS자동 비행 기능을 더 추구 합니다.<장점>:1.초보자가 접근하는데 진입장벽이 낮다.2.GPS기능을 이용한 드론 자윯제어에 아주 최적화 되어있음.3.RC비행기 제어에 적합.4.드론 비행촬영의 품질이 좋다.<단점>:1.곡예 비행제어에는 약하다.2.VTOL같은 종류의 드론제어에 대한 기능이 적다.*각 소프트웨어 참고 영상입니다.1.<ARDUPILOT>:https://youtu.be/LKpMfl6EHOQ?si=MciBClFHo4fTwHuuFPV pilot tries Pixhawk for the first time // Introduction to ArdupilotUncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…youtu.be2.<INAV>:https://youtu.be/bEKm-PGRnks?si=klX1OA0FxGHKeu1r3.<BETAFLIGHT>:https://youtu.be/W8PMKUQX4q0?si=h9CDOYpX990EFmpw이렇게 대표적으로 많이 사용하는드론 소프트웨어에 대해 알아봤습니다.여기서 저는 INVA소프트웨어를 이용해드론을 제어했습니다.이제 만드는 과정을 설명 하겠습니다.◇<사용한 부품>:1.STM32F411CEU62.점퍼케이블 암/수3.PCB납땜 기판4.hmc5883L(나침반 자력게 센서)5.mpu6050(가속도 자이로 센서)6.BMP280(기압 고도 센서)7.핀헤더(암/수)8.FS-1A6B(수신기)9.FLYSKY 조종기10.케이블 타이11.ST-LINK V2다운로더(STM32용)12.GPS_NEO6M12.at2212 브러시리스 모터13.ESC 30A14.1045프로펠러15.F450 드론 프레임16.리포배터리 11.1v 2200mah 또는 1500mah17.리포배터리 충전기위 부품을 가지고사진의 회로도에 따라 각 부품에 전선을연결합니다.전선 연결 후 완성된 드론제어 보드 모습입니다.F450드론 프레임을 조립하고 그 위에 브러시리스 모터,ESC, 만든 제어보드를추가로 프레임에 장착합니다.
-STM32를 이용한 쿼드콥터 제작 및 3d프린터로 제작중인 트리콥터안녕하세요. [3D프린터로 영구동기발전기 만들기]란 제목으로 게시글을 올린전기공학과 학생입니다.오늘은 INAV 소프트웨어와 STM32F411CEU6를 이용하여 F450 멀티콥터 드론을 제작한경험과 현재 3D 프린터로 제작중인 트리(TRICOPTER)콥터 소개할려고 합니다.1.[INAV 소프트웨어및 STM32F411로 제작한 쿼드콥터 제작]:<완성된 쿼드콥터 드론 모습>제작하는 과정을 소개하기 전에, 멀티콥터의 정의와 드론에 사용되는 소프트웨어에대해 알아보겠습니다.[쿼드콥터]: 회전날개(로터)를 4개 가지고 있으며, 이 4개의 날개을 이용해 양력을 발생시켜비행하는 드론입니다.[특징]: 각 로터는 연직 아래를 향해 있으면, 두 개는 시계방향으로, 나머지 두 개는반시계 방향으로 회전합니다. 이들 로터의 회전 속도를 조절함으로써 쿼드콥터의움직임을 제어할 수 있습니다.///////////////////////////////////////////////////////////////////////////////////////////////////////////드론제어에 대표적으로 사용하는 소프트웨어 3개를 살펴보면,1.[ARDUPILOT]:아두이노+Autopilot 의 줄임말으로,무인 차량 및 드론 등 원격조정 또는 자동화, 자율제어에 대한 오픈소스 소프트웨어 입니다.<장점>:1.그래픽 디자인이 세련됨.2.pc용,맥북,아이폰/아이패드,안드로이드용 모두 있으며 통일된 인터페이스를 가짐.3.상업적 사용에 대한 소스코드 의무 공개가 없다.<단점>:1텔레메트리 라디오 설정이 불편.2.드론 모터 테스트같은 GUI가 없다.3.드론 초심자가 접근하기 힘듬.2.[BETAFLIGHT]:누구나 무료로 사용할 수 있는 오픈소스 프로그램 입니다.베이스플라이트(BASEFLIGHT)란 소프트웨어에서 파생된 클린플라이트(CLEANFLIGHT)소프트웨어에서 다시파생된 오픈소스 소프트웨어이고 레이싱 드론을 제어하는데 있어 최적화된 소프트웨어 입니다.<장점>:1.레이싱 드론 제어에 대한 기능들이 많이 있음.2.드론을 가지고 곡예가 가능.즉 다이나믹한 동작을 구현할 수 있다.3.소프트웨어 가독성이 좋다(즉 초심자가 접근하기 쉽다.)<단점>:1. MISSIONPLANER같은 세부적이고 정밀적인 자율제어는 약하다.2.PID제어가 민감해서 드론 모터가 쉽게 발열이 발생.3..RC비행기 같은 드론을 제어하는데 적합하지 않다.3.[INAV]:CLEANFLIGHT 소프트웨어에서 파생된 오픈소스 소프트웨어이고 사요하는 FV기반으로 DJI NAZA시리즈나 ARDUPILOT MEAG와같은 GPS기반 항법이 가능한 FC를 구현합니다. 비행 성능 보다는 GPS자동 비행 기능을 더 추구 합니다.<장점>:1.초보자가 접근하는데 진입장벽이 낮다.2.GPS기능을 이용한 드론 자윯제어에 아주 최적화 되어있음.3.RC비행기 제어에 적합.4.드론 비행촬영의 품질이 좋다.<단점>:1.곡예 비행제어에는 약하다.2.VTOL같은 종류의 드론제어에 대한 기능이 적다.*각 소프트웨어 참고 영상입니다.1.<ARDUPILOT>:https://youtu.be/LKpMfl6EHOQ?si=MciBClFHo4fTwHuuFPV pilot tries Pixhawk for the first time // Introduction to ArdupilotUncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…youtu.be2.<INAV>:https://youtu.be/bEKm-PGRnks?si=klX1OA0FxGHKeu1r3.<BETAFLIGHT>:https://youtu.be/W8PMKUQX4q0?si=h9CDOYpX990EFmpw이렇게 대표적으로 많이 사용하는드론 소프트웨어에 대해 알아봤습니다.여기서 저는 INVA소프트웨어를 이용해드론을 제어했습니다.이제 만드는 과정을 설명 하겠습니다.◇<사용한 부품>:1.STM32F411CEU62.점퍼케이블 암/수3.PCB납땜 기판4.hmc5883L(나침반 자력게 센서)5.mpu6050(가속도 자이로 센서)6.BMP280(기압 고도 센서)7.핀헤더(암/수)8.FS-1A6B(수신기)9.FLYSKY 조종기10.케이블 타이11.ST-LINK V2다운로더(STM32용)12.GPS_NEO6M12.at2212 브러시리스 모터13.ESC 30A14.1045프로펠러15.F450 드론 프레임16.리포배터리 11.1v 2200mah 또는 1500mah17.리포배터리 충전기위 부품을 가지고사진의 회로도에 따라 각 부품에 전선을연결합니다.전선 연결 후 완성된 드론제어 보드 모습입니다.F450드론 프레임을 조립하고 그 위에 브러시리스 모터,ESC, 만든 제어보드를추가로 프레임에 장착합니다.
-STM32를 이용한 쿼드콥터 제작 및 3d프린터로 제작중인 트리콥터
-
STM32를 이용한 쿼드콥터 제작 및 3d프린터로 제작중인 트리콥터
STM32를 이용한 쿼드콥터 제작 및 3d프린터로 제작중인 트리콥터
안녕하세요. [3D프린터로 영구동기발전기 만들기]란 제목으로 게시글을 올린
전기공학과 학생입니다.
오늘은 INAV 소프트웨어와 STM32F411CEU6를 이용하여 F450 멀티콥터 드론을 제작한
경험과 현재 3D 프린터로 제작중인 트리(TRICOPTER)콥터 소개할려고 합니다.
1.[INAV 소프트웨어및 STM32F411로 제작한 쿼드콥터 제작]:
1.[INAV 소프트웨어및 STM32F411로 제작한 쿼드콥터 제작]:

<완성된 쿼드콥터 드론 모습>
제작하는 과정을 소개하기 전에, 멀티콥터의 정의와 드론에 사용되는 소프트웨어에
대해 알아보겠습니다.
[쿼드콥터]: 회전날개(로터)를 4개 가지고 있으며, 이 4개의 날개을 이용해 양력을 발생시켜
비행하는 드론입니다.
[특징]: 각 로터는 연직 아래를 향해 있으면, 두 개는 시계방향으로, 나머지 두 개는
반시계 방향으로 회전합니다. 이들 로터의 회전 속도를 조절함으로써 쿼드콥터의
움직임을 제어할 수 있습니다.
///////////////////////////////////////////////////////////////////////////////////////////////////////////
드론제어에 대표적으로 사용하는 소프트웨어 3개를 살펴보면,

1.[ARDUPILOT]:
1.[ARDUPILOT]
아두이노+Autopilot 의 줄임말으로,
무인 차량 및 드론 등 원격조정 또는 자동화, 자율제어에 대한 오픈소스 소프트웨어 입니다.
<장점>:1.그래픽 디자인이 세련됨.
>:
2.pc용,맥북,아이폰/아이패드,안드로이드용 모두 있으며 통일된 인터페이스를 가짐.
3.상업적 사용에 대한 소스코드 의무 공개가 없다.
<단점>:1텔레메트리 라디오 설정이 불편.
<단점>:
2.드론 모터 테스트같은 GUI가 없다.
3.드론 초심자가 접근하기 힘듬.
2.[BETAFLIGHT]:
2.[BETAFLIGHT]:
누구나 무료로 사용할 수 있는 오픈소스 프로그램 입니다.
베이스플라이트(BASEFLIGHT)란 소프트웨어에서 파생된 클린플라이트(CLEANFLIGHT)소프트웨어에서 다시
파생된 오픈소스 소프트웨어이고 레이싱 드론을 제어하는데 있어 최적화된 소프트웨어 입니다.
<장점>:1.레이싱 드론 제어에 대한 기능들이 많이 있음.
>:
2.드론을 가지고 곡예가 가능.즉 다이나믹한 동작을 구현할 수 있다.
3.소프트웨어 가독성이 좋다(즉 초심자가 접근하기 쉽다.)
<단점>:1. MISSIONPLANER같은 세부적이고 정밀적인 자율제어는 약하다.
>:
2.PID제어가 민감해서 드론 모터가 쉽게 발열이 발생.
3..RC비행기 같은 드론을 제어하는데 적합하지 않다.
3.[INAV]:CLEANFLIGHT 소프트웨어에서 파생된 오픈소스 소프트웨어이고 사요하는 FV기반으로 DJI NAZA시리즈나 ARDUPILOT MEAG와
]:
같은 GPS기반 항법이 가능한 FC를 구현합니다. 비행 성능 보다는 GPS자동 비행 기능을 더 추구 합니다.
<장점>:1.초보자가 접근하는데 진입장벽이 낮다.
>:
2.GPS기능을 이용한 드론 자윯제어에 아주 최적화 되어있음.
3.RC비행기 제어에 적합.
4.드론 비행촬영의 품질이 좋다.
<단점>:1.곡예 비행제어에는 약하다.
>:
2.VTOL같은 종류의 드론제어에 대한 기능이 적다.
*각 소프트웨어 참고 영상입니다.
1.<ARDUPILOT>:
https://youtu.be/LKpMfl6EHOQ?si=MciBClFHo4fTwHuu
https://youtu.be/LKpMfl6EHOQ?si=MciBClFHo4fTwHuu
FPV pilot tries Pixhawk for the first time // Introduction to ArdupilotUncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…youtu.be

FPV pilot tries Pixhawk for the first time // Introduction to ArdupilotUncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…youtu.be
FPV pilot tries Pixhawk for the first time // Introduction to Ardupilot
FPV pilot tries Pixhawk for the first time // Introduction to Ardupilot
FPV pilot tries Pixhawk for the first time // Introduction to Ardupilot
Uncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…
Uncertain about what to buy? Check out THE ULTIMATE FPV SHOPPING LIST: https://www.fpvknowitall.com/ultimate-fpv-shopping-listSUPPORT ME ON PATREON at: http:…
youtu.be
youtu.be
2.<INAV>:
https://youtu.be/bEKm-PGRnks?si=klX1OA0FxGHKeu1r
https://youtu.be/bEKm-PGRnks?si=klX1OA0FxGHKeu1r
3.<BETAFLIGHT>:
https://youtu.be/W8PMKUQX4q0?si=h9CDOYpX990EFmpw
https://youtu.be/W8PMKUQX4q0?si=h9CDOYpX990EFmpw
이렇게 대표적으로 많이 사용하는
드론 소프트웨어에 대해 알아봤습니다.
여기서 저는 INVA소프트웨어를 이용해
드론을 제어했습니다.
이제 만드는 과정을 설명 하겠습니다.
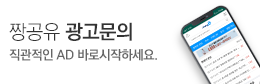
◇<사용한 부품>:1.STM32F411CEU62.점퍼케이블 암/수3.PCB납땜 기판4.hmc5883L(나침반 자력게 센서)5.mpu6050(가속도 자이로 센서)6.BMP280(기압 고도 센서)7.핀헤더(암/수)8.FS-1A6B(수신기)9.FLYSKY 조종기10.케이블 타이11.ST-LINK V2다운로더(STM32용)12.GPS_NEO6M

12.at2212 브러시리스 모터
13.ESC 30A14.1045프로펠러15.F450 드론 프레임16.리포배터리 11.1v 2200mah 또는 1500mah
13.ESC 30A
14.1045프로펠러
15.F450 드론 프레임
16.리포배터리 11.1v 2200mah 또는 1500mah
17.리포배터리 충전기
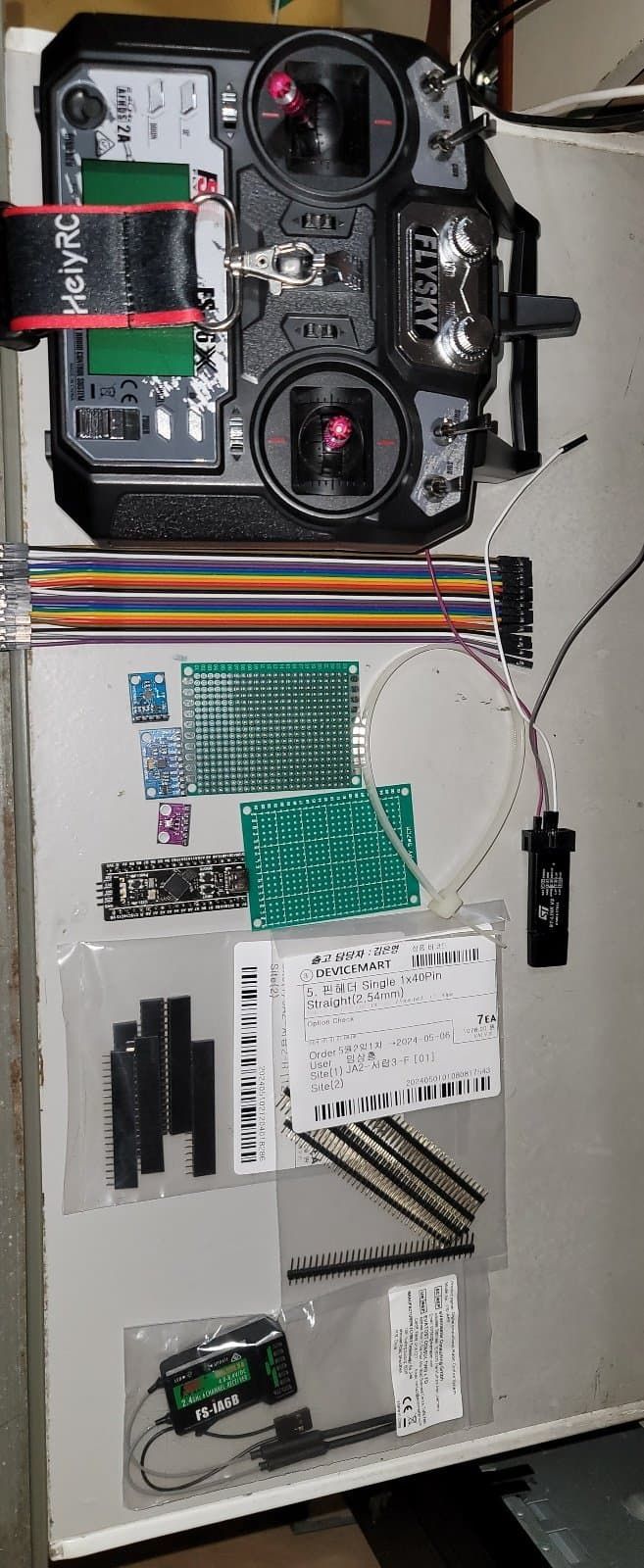
위 부품을 가지고
사진의 회로도에 따라 각 부품에 전선을
연결합니다.
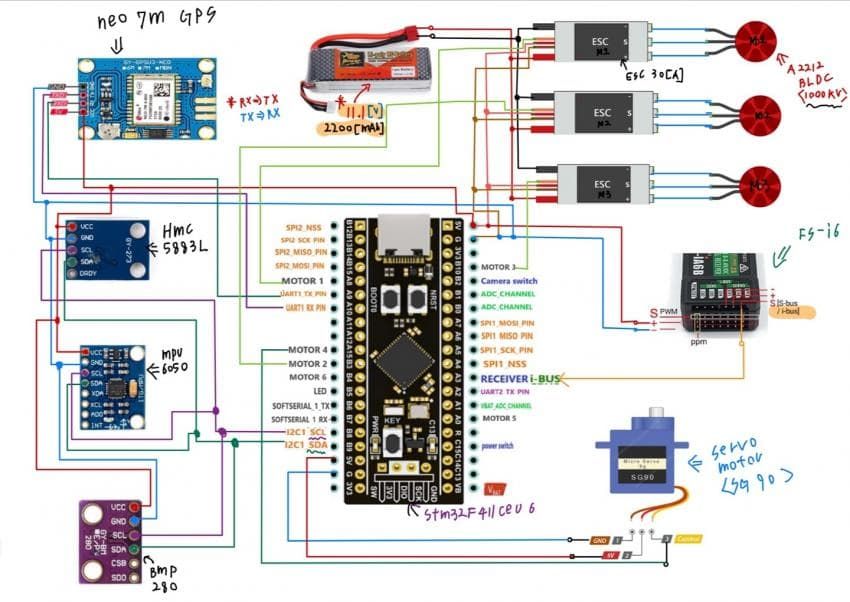
전선 연결 후 완성된 드론제어 보드 모습
입니다.

F450드론 프레임을 조립하고 그 위에 브러시리스 모터,ESC, 만든 제어보드를
추가로 프레임에 장착합니다.
 다시태어나면결혼안함의 최근 게시물
다시태어나면결혼안함의 최근 게시물