
극소형 로봇 헬기(Nano Quadrotors)
댓글
8조회
3,022추천
7
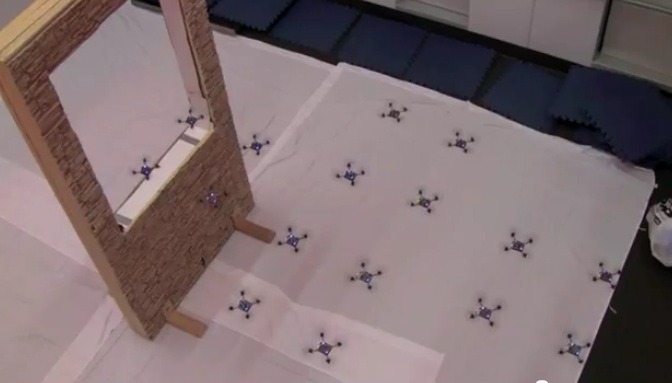
펜실베니아 대학 GRASP(General Robotics, Automation, Sensing and Perception) 연구소
로봇연구팀이 개발한 극소형 헬리콥터 Nano Quadrotors 개량형
빠르고 정확한 반전과 방향전환, 장애물회피, 편대비행과 8자 비행 가능
자율적 편대비행중 서로 통신으로 위치를 유지하는 개선된 성능

 구구크러스터의 최근 게시물
구구크러스터의 최근 게시물